Part A
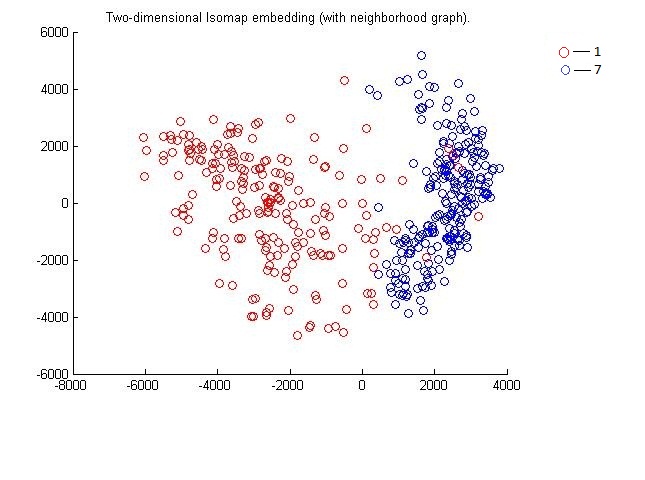
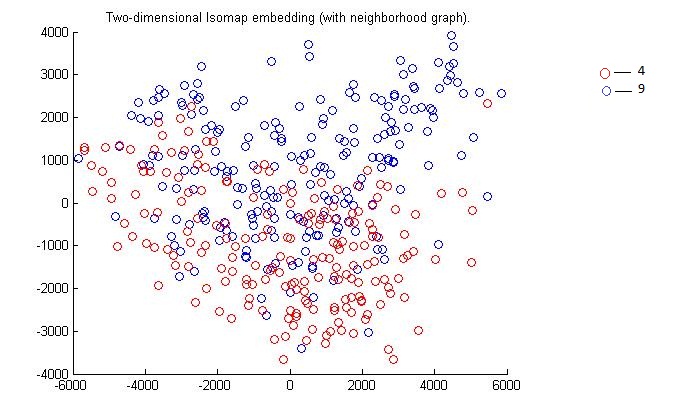
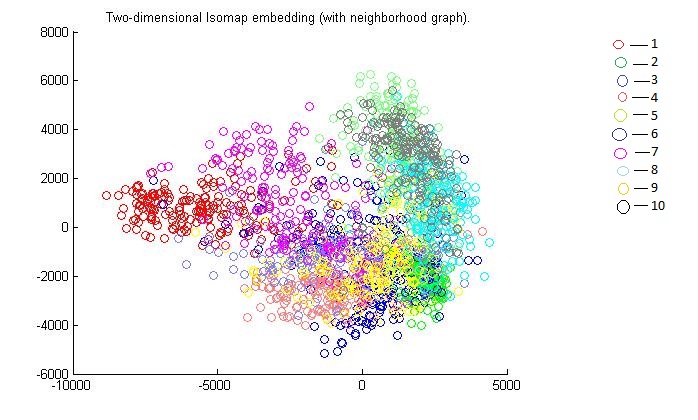
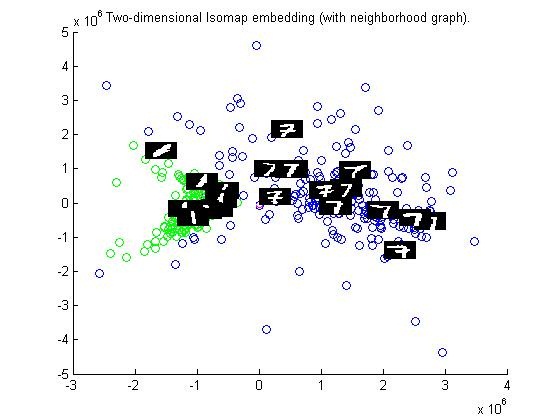
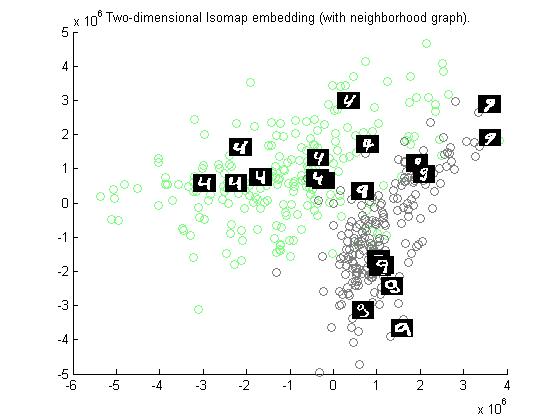
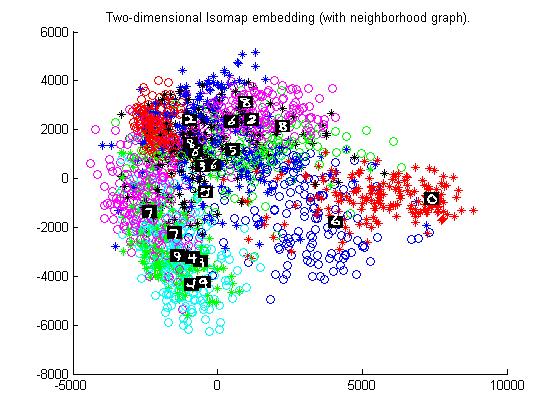
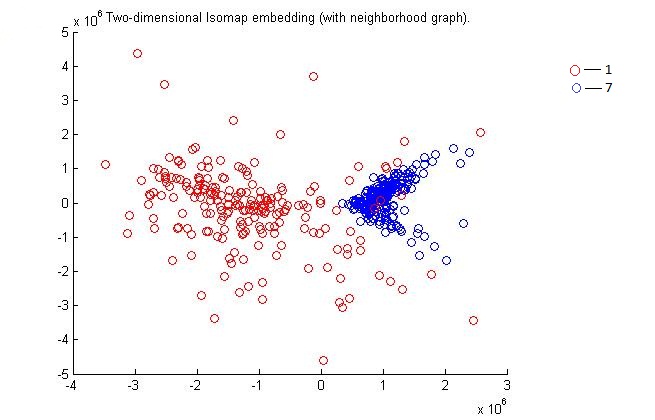

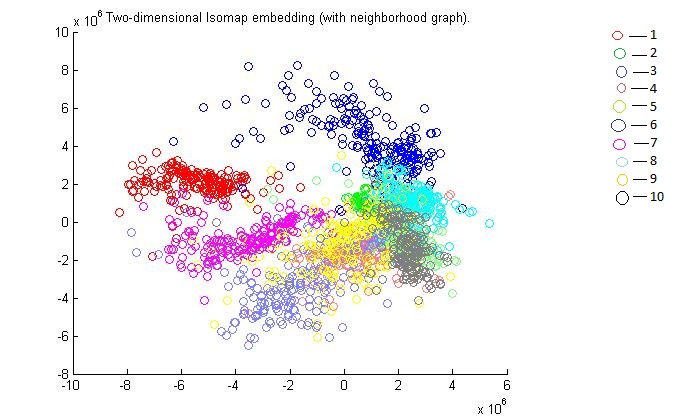
Construct the 2-D Isomap model for the first 2000 samples of the MNIST training set using Euclidean distance. Show the clusters of the following groups:
Qs 1) Using Euclidean Distance[Top]
Solution A :
Solution B :
Solution C :
Solution D :
Qs 2) Using Tangent distance[Top]
Solution A :
Solution B :
Solution C :
Part B
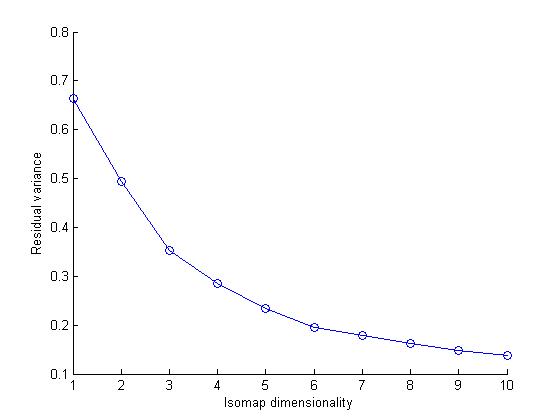
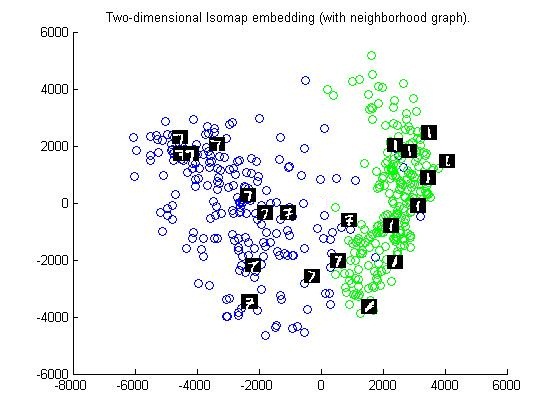
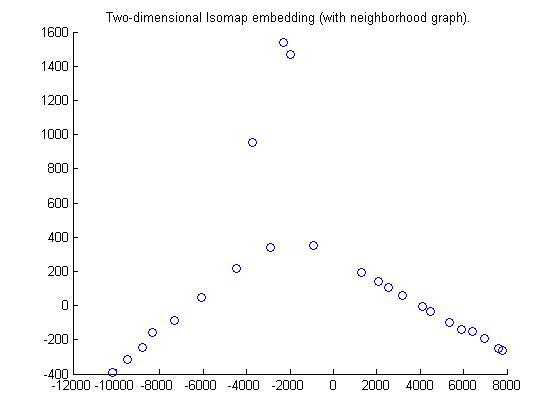
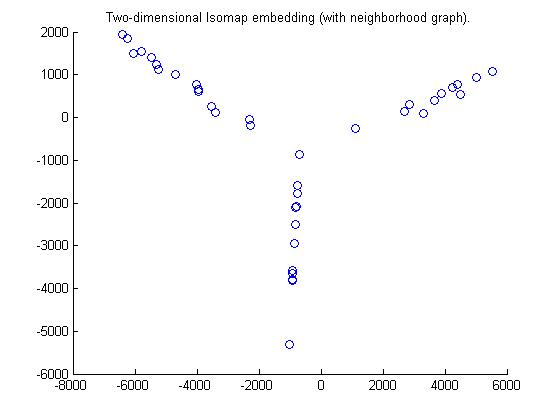
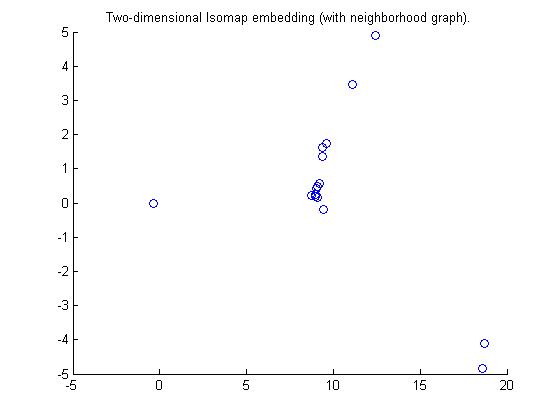
Qs1) Hand Motion of a Nao Robot[Top]
Using Euclid Distance
Using Tangent Distance
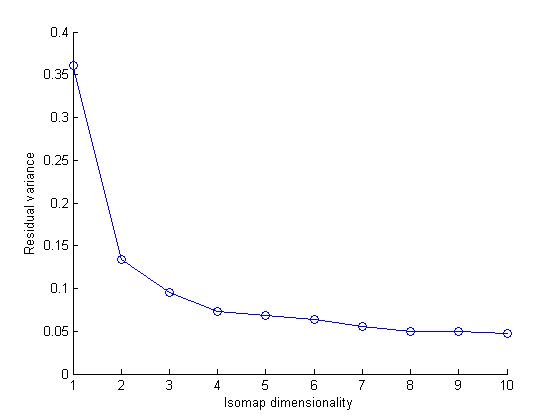
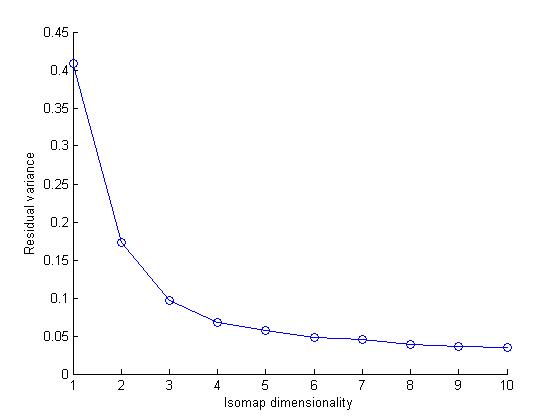
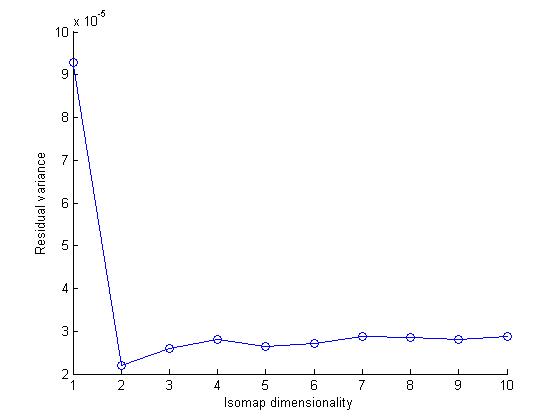
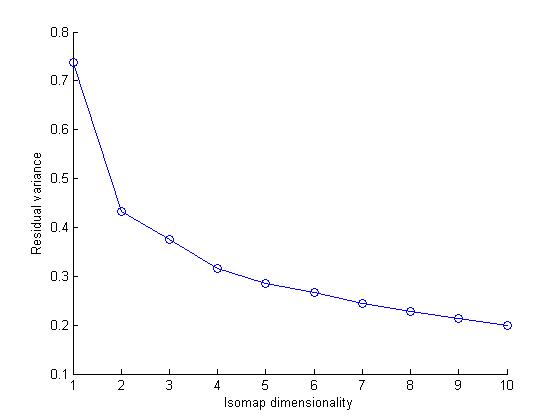
- Report the most likely dimensionality of the manifold embedded in these high-dimensional images, as you observe it from the residual error curve. Explain the dimensionality that you observe.
Ans : The dimensionality of the graph is 2. The reason for it is that Nao Robot is only moving its one arm which has 2 joints rotating independently of each other, which is accounting for 2-Degrees of Freedom.
Ans : The dimensionality of the graph is 2. The reason for it is that Nao Robot is only moving its one arm which has 2 joints rotating independently of each other, which is accounting for 2-Degrees of Freedom.
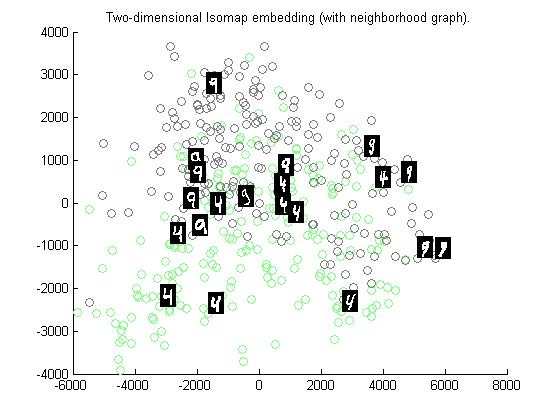
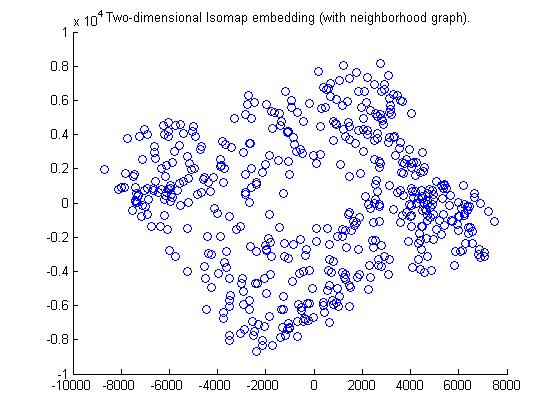
Qs 2) Articulated Arms of a robot[Top]
Using Euclid Distance
Using Tangent Distance
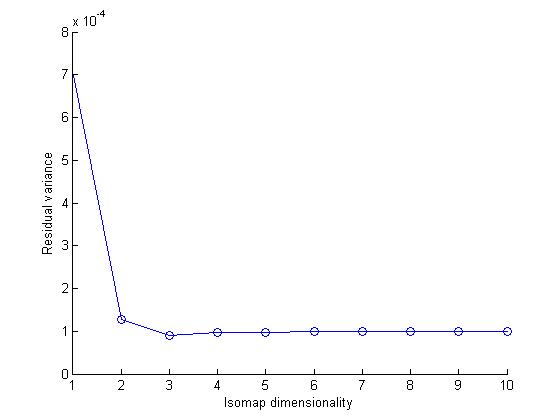
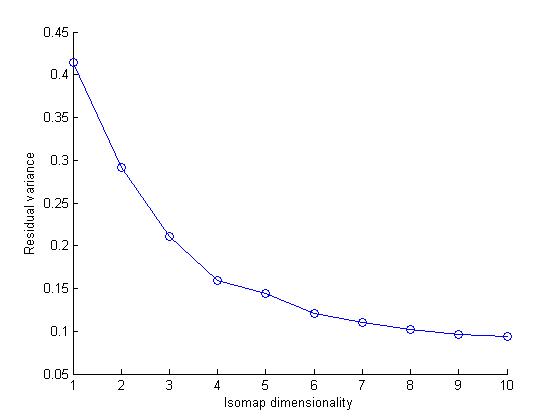
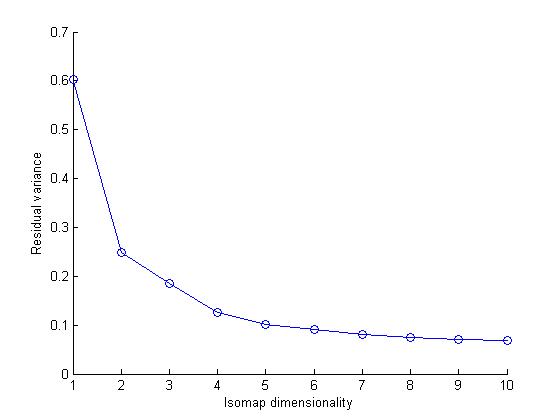
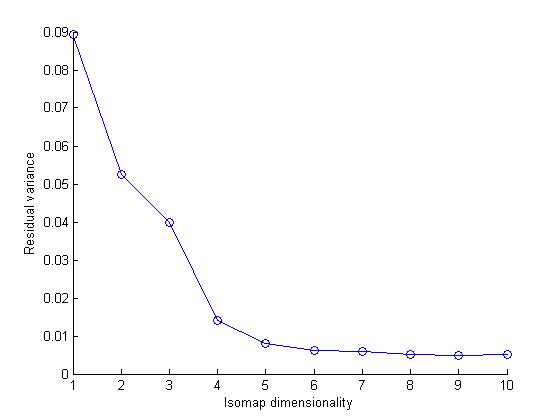
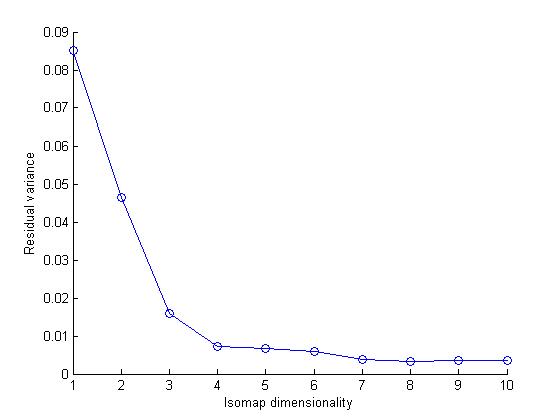
-report the most likely dimensionality of the data as you observe it from the residual error curve. Explain the dimensionality you observe.
Ans : The dimensionality of the graph is 4. The reason for it is that the two arms shown in the images have 2-Degrees of Freedom each which are 'theta1' and 'theta2' and both the arms are moving themselves independently in random direction. So, in total, number of degrees of freedom is 4.
Ans : The dimensionality of the graph is 4. The reason for it is that the two arms shown in the images have 2-Degrees of Freedom each which are 'theta1' and 'theta2' and both the arms are moving themselves independently in random direction. So, in total, number of degrees of freedom is 4.
Qs 3) Solve for Theta1,Theta2,Theta3,Theta4 [Top]
Ans :Theta1 = 144 degree, Theta2 = 12 degree, Theta3 = 81 degree,Theta4 = 169 degree [PDF]Qs 4) Articulated Arm holding a box [Top]
Using Euclid Distance
1) Neighbourhood Size=7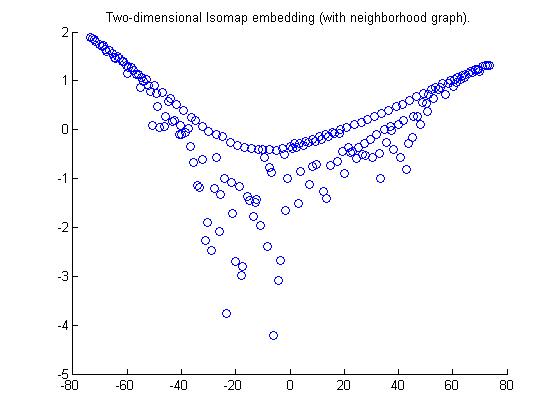
2) Neighbourhood Size=100
Using Tangent Distance
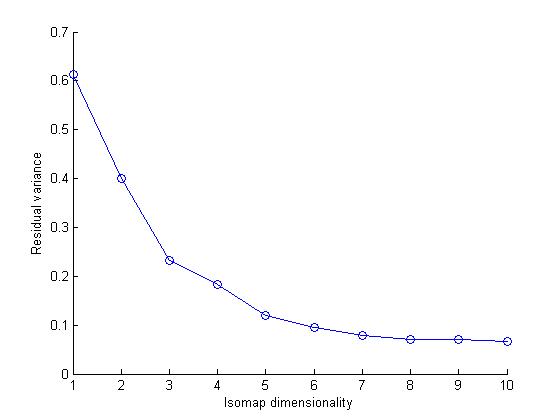
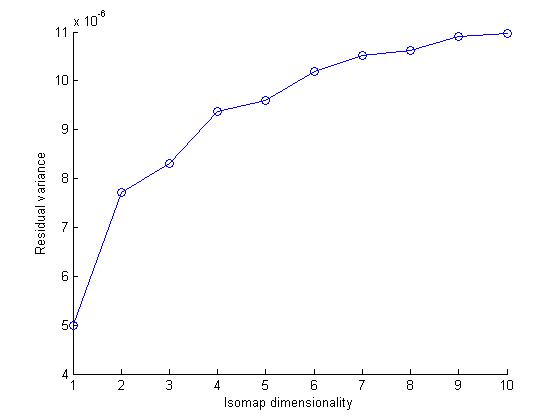
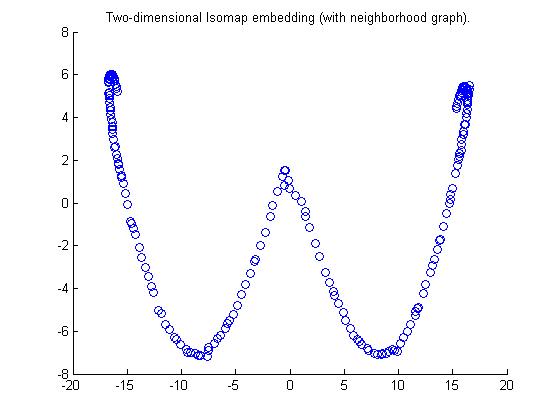
- report the best dimensionality of the resulting data. Compare with your answer in B2 and explain your result
Ans : The dimensionality of the graph is 1. The reason is that the two arms have to hold the box continuously. So, the motion is constrained in one direction whereas in part 2, the motion was totally in random direction and there were no constraints. Hence, the dimension has decreased in part 4 as compared to part 2.
Ans : The dimensionality of the graph is 1. The reason is that the two arms have to hold the box continuously. So, the motion is constrained in one direction whereas in part 2, the motion was totally in random direction and there were no constraints. Hence, the dimension has decreased in part 4 as compared to part 2.