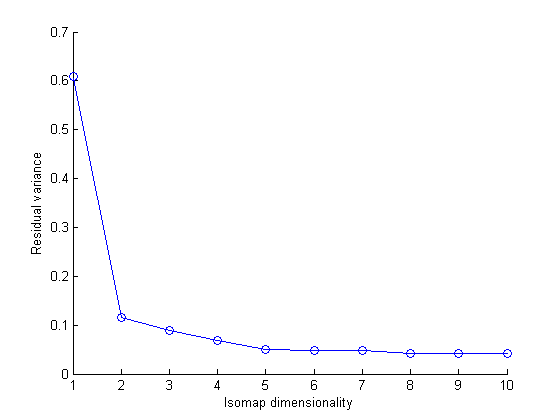
The dimentionality can be justified at 2 as the elbow in residual variance vs dimentionality plot shown above appears at 2.
Part B
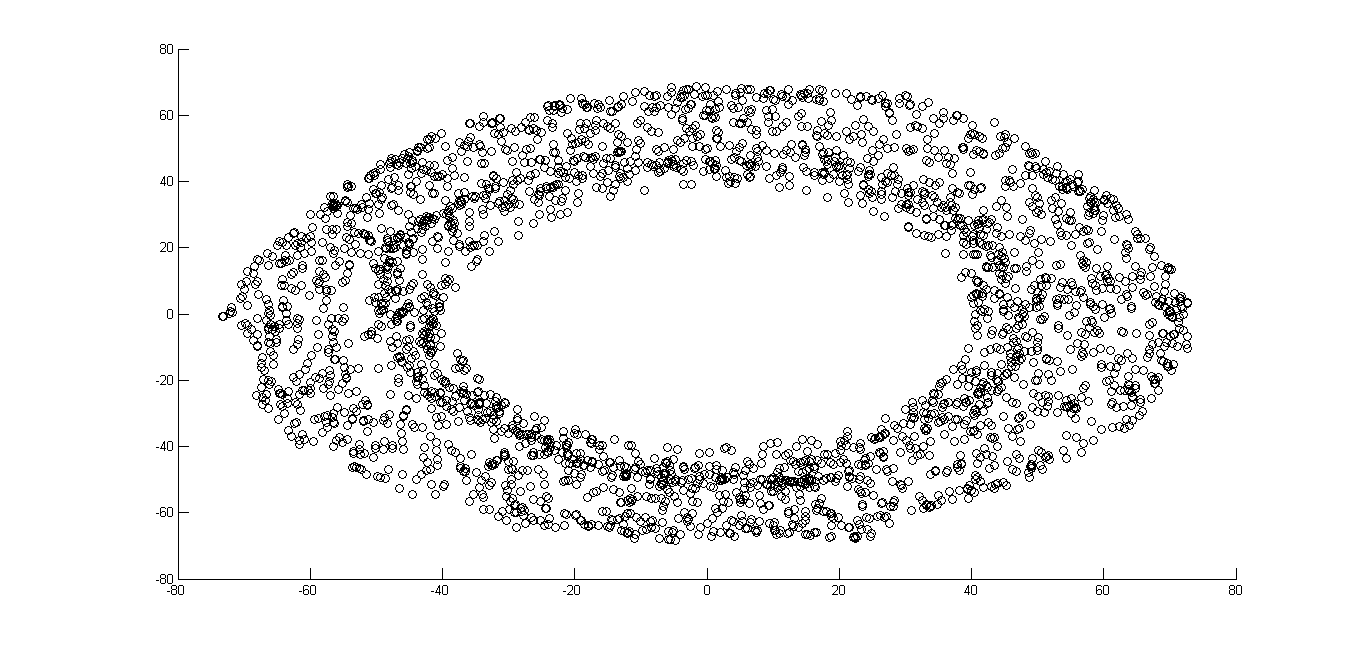
The 2-dimensional manifold of the given robot system is shown in the first plot
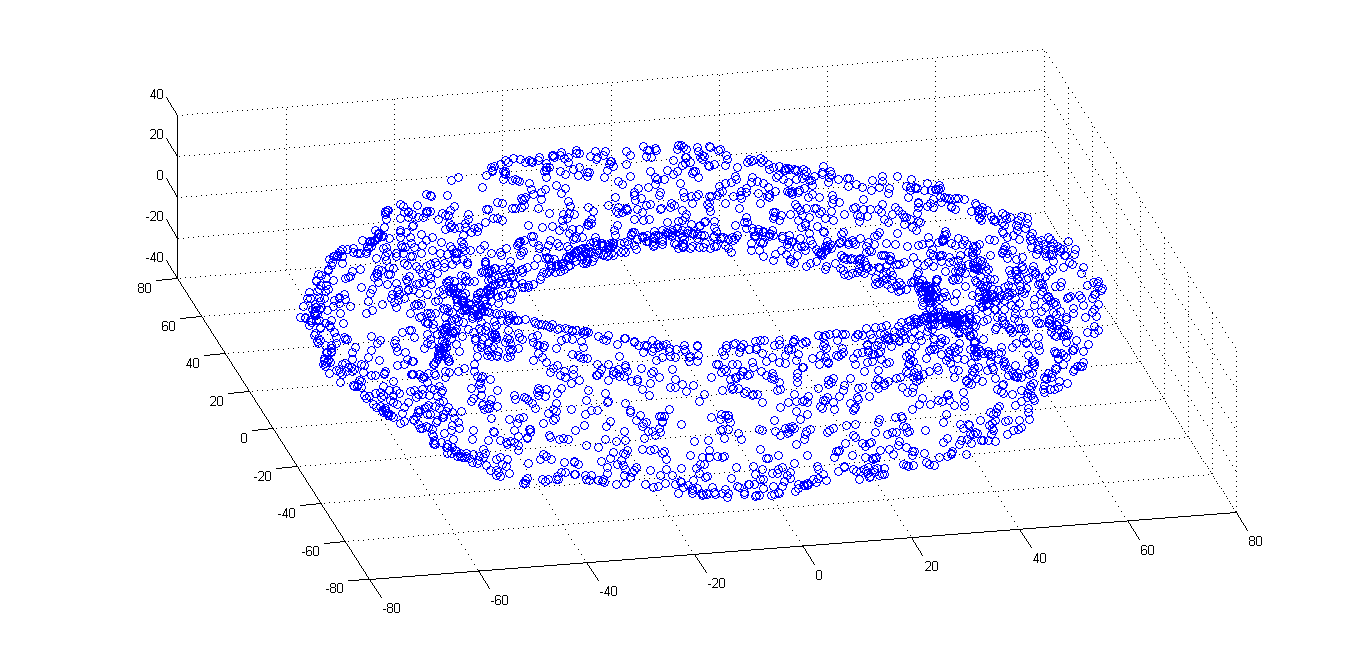
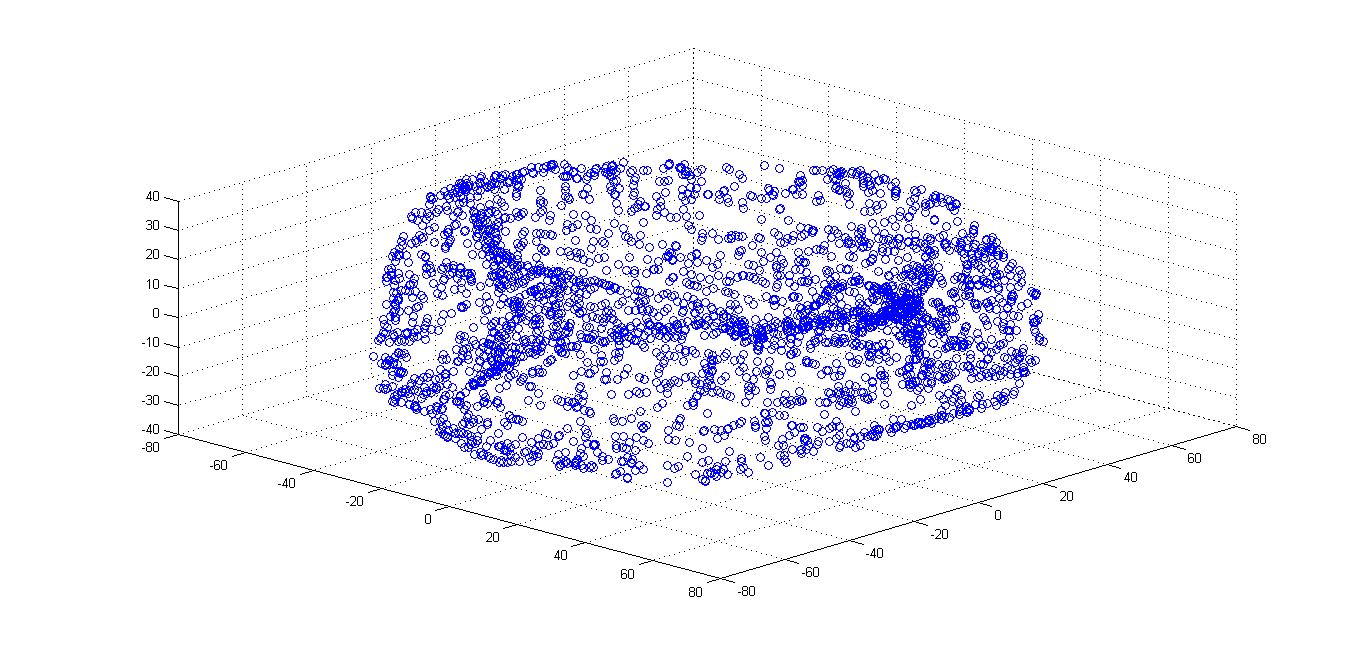
Some images are too superimposed in the second plot
Part C
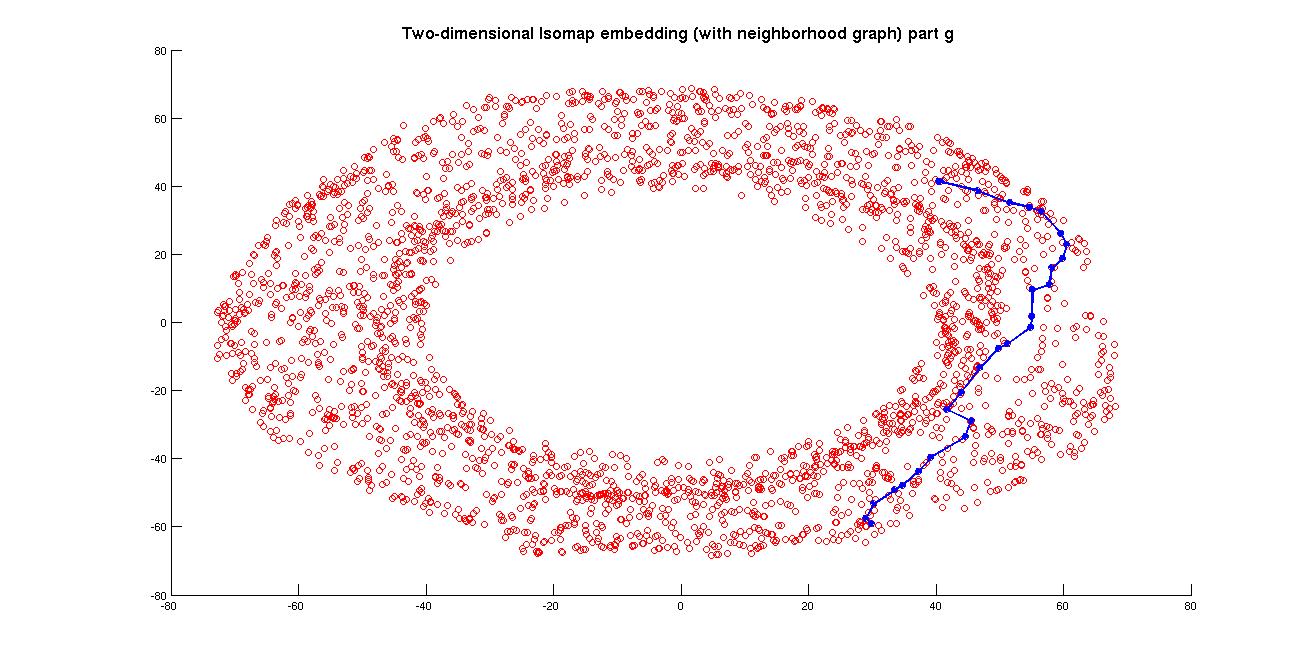
From the 2-D isomap below, we can clearly see that :-
theta1 changes as we rotate around this torus figure in Isomap and theta2 varies in radial direction. It can be thought of as a projection of 3D torus on a plane where each point corresponds to unique (theta1,theta2).