Assignment 3
Part A. Various Dimensionalities
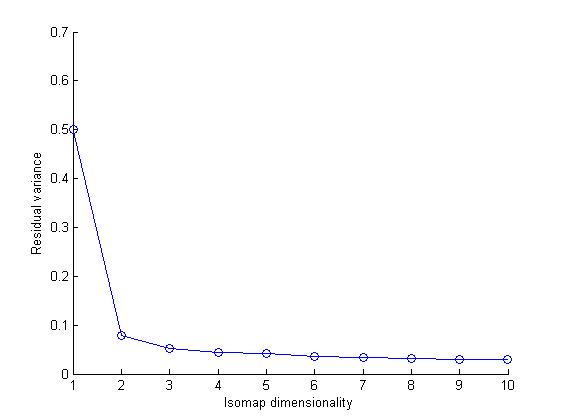
We can see that the Residual variance falls sharply when dimensionality is 2, and does not have much effect in variance after that.
So, we can say that the dimensionality of this manifold is best explained at two
Part B. Embedding of arm images
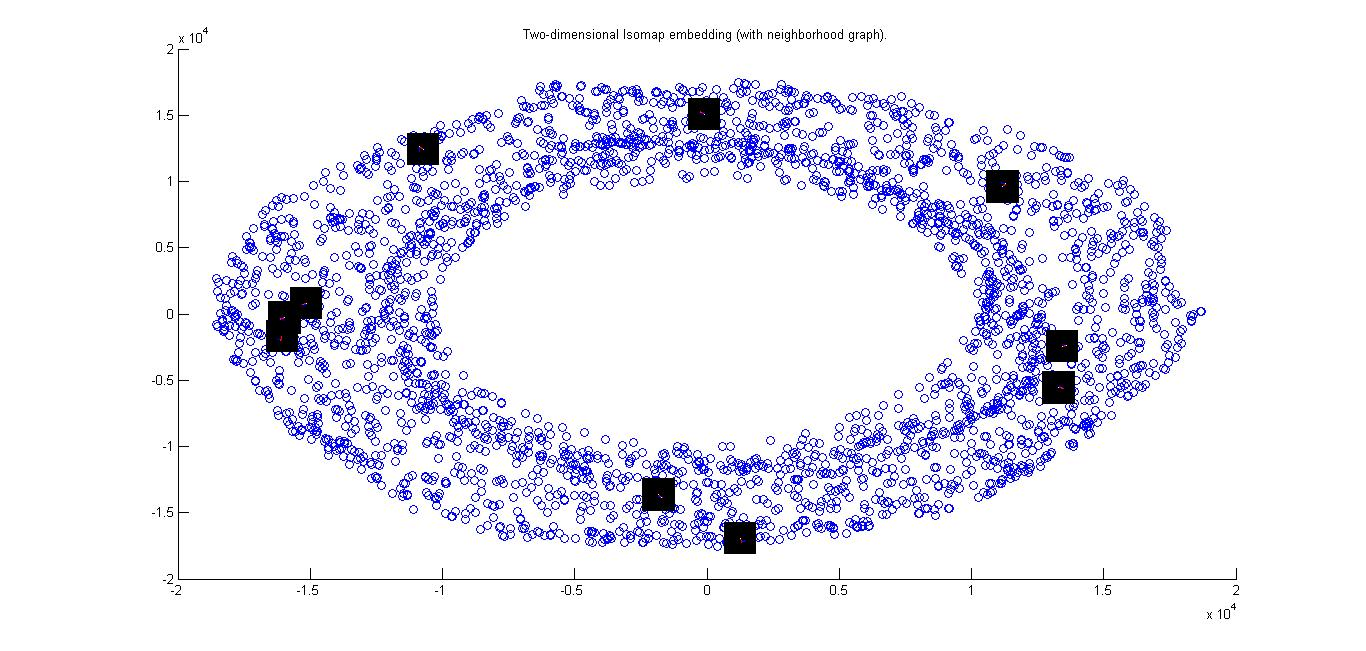
Part C. Variation of theta1 and theta2
On the 2D isomap, for a particular theta1, theta2 varies along a straight line. The variation of theta2 is almost (+-)90 degree at the centre, and (+-)180 on the inner circumference.
In the 3D manifold, for a particular theta1, the values of theta2 are such that they form a toroid, and the outermost point has value theta2 = 0 whereas inner points have (+-)180 degree.
Part D. In 3D space

Part E

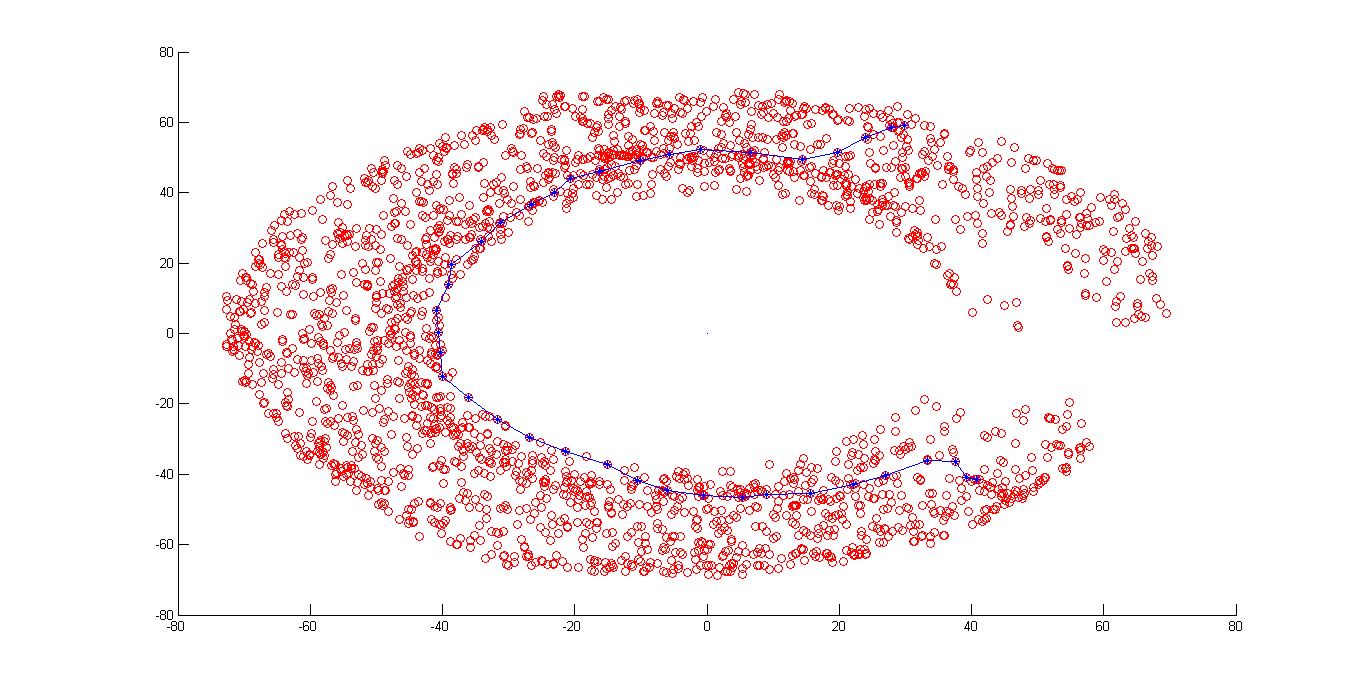
Part F
The isomap where the arm collides with object in the first location.
The path is as shown.
Part G
The isomap where the arm collides with object in the second location.
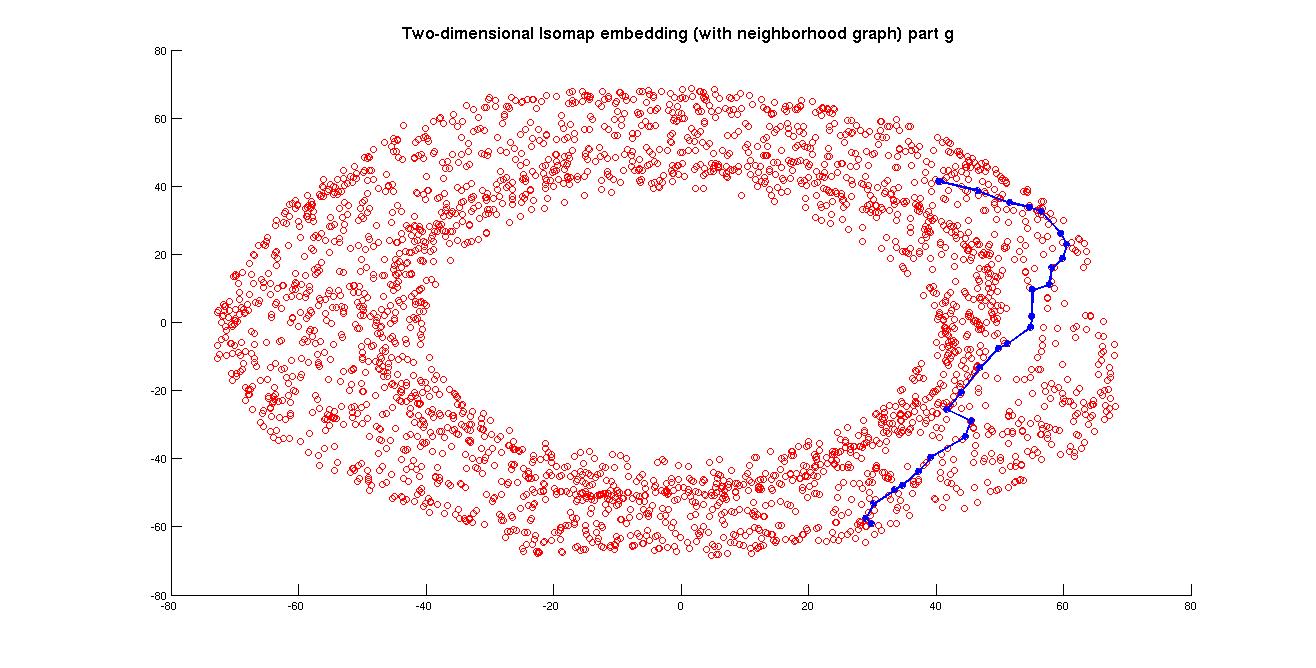
Because of new location, some values of theta2 will not be possible, because for no vale of theta2 will there be a collision between robot arm and the object.
Download the source code here