|
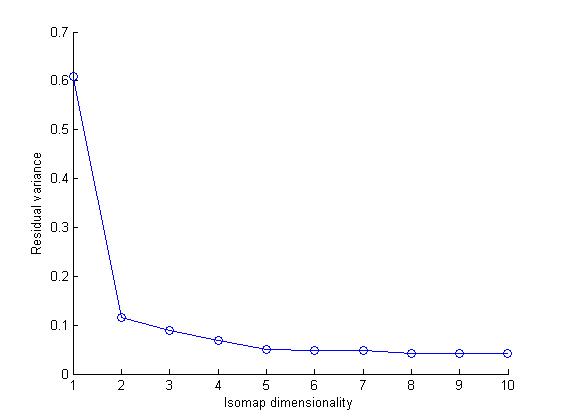 |
We can observe that there is a sharp kink at dimensionality equal to 2. |
|
|
We can observe that there is a sharp kink at dimensionality equal to 2. |
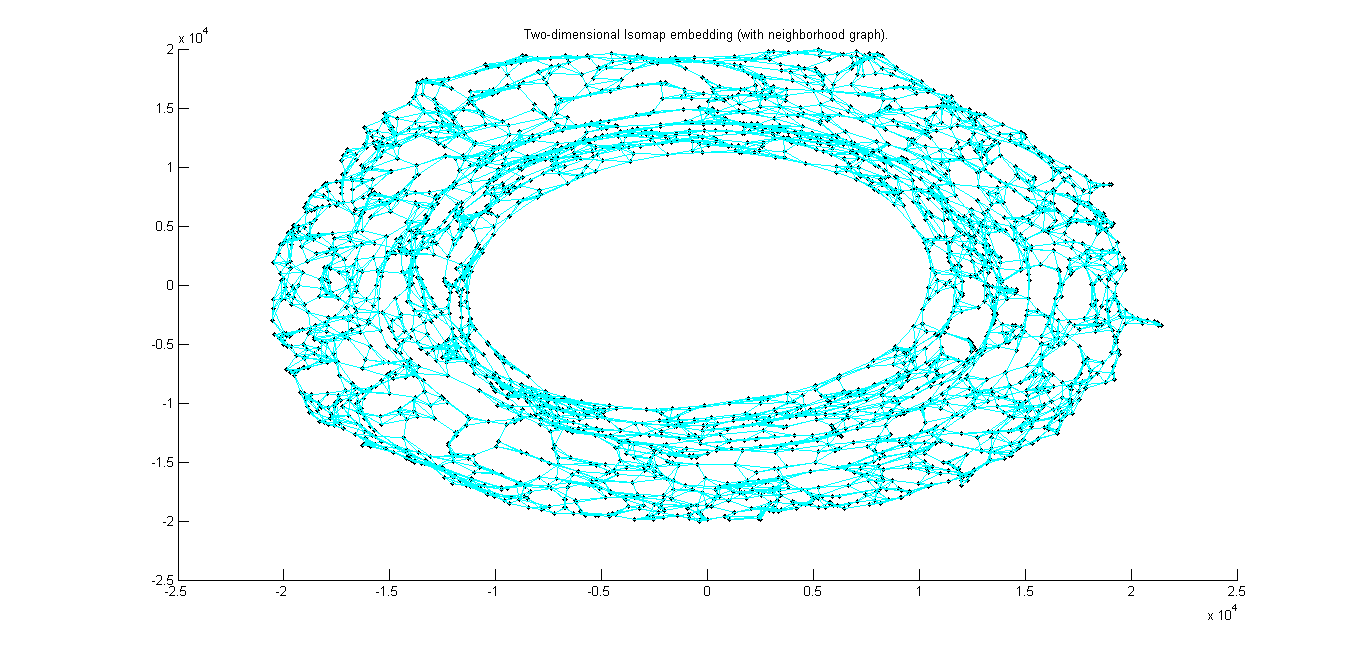
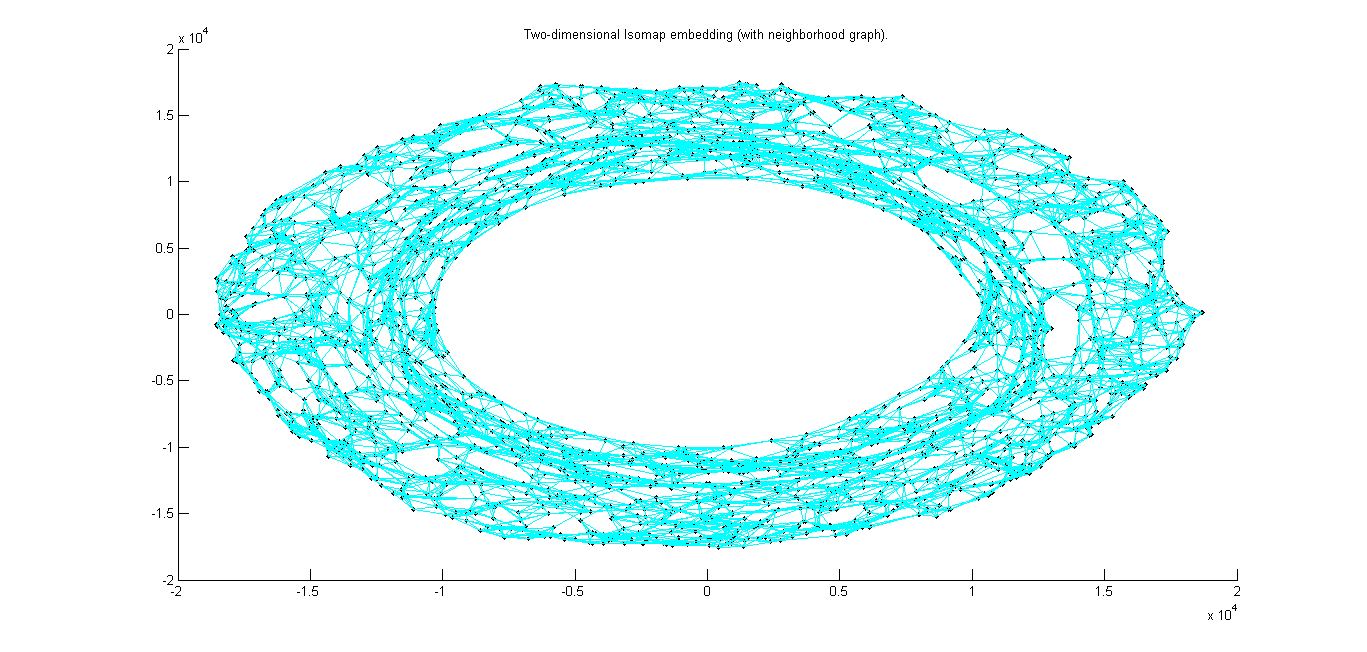
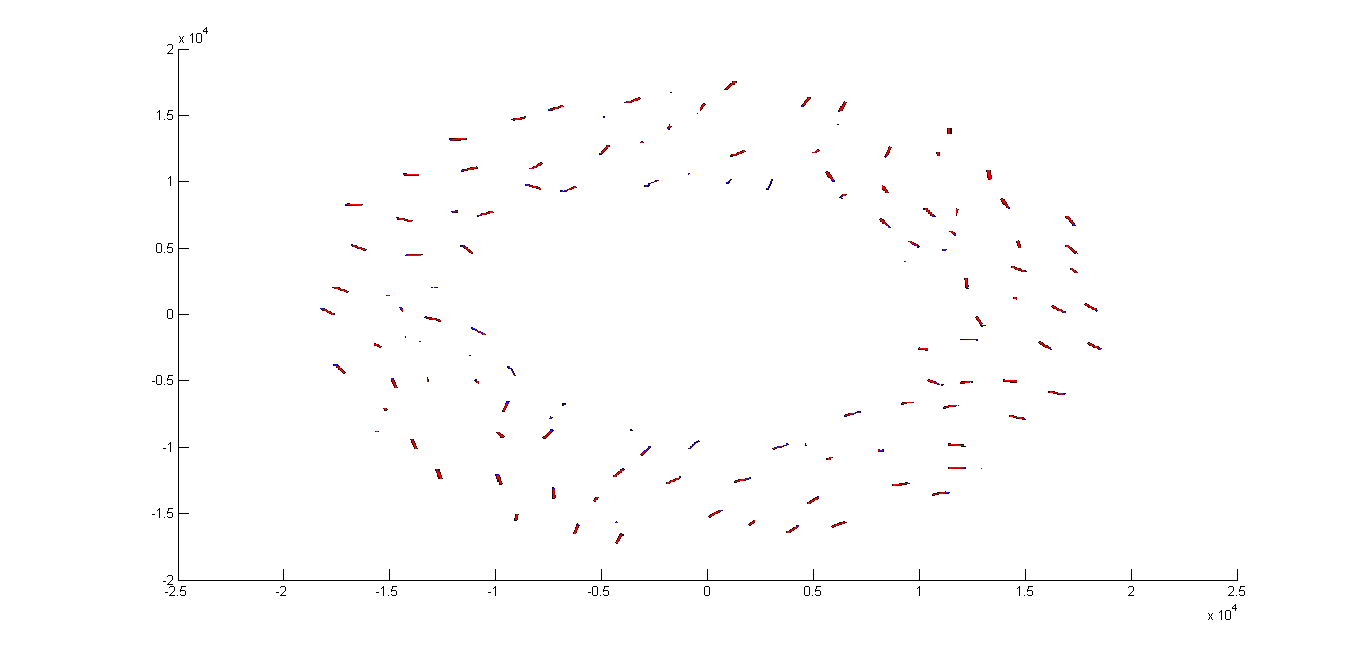
2-D embedding when k=5 using Isomap.m |
 |
2-D embedding when k=5 using Isomap.m |
 |
|
 |
 |
 |
 |
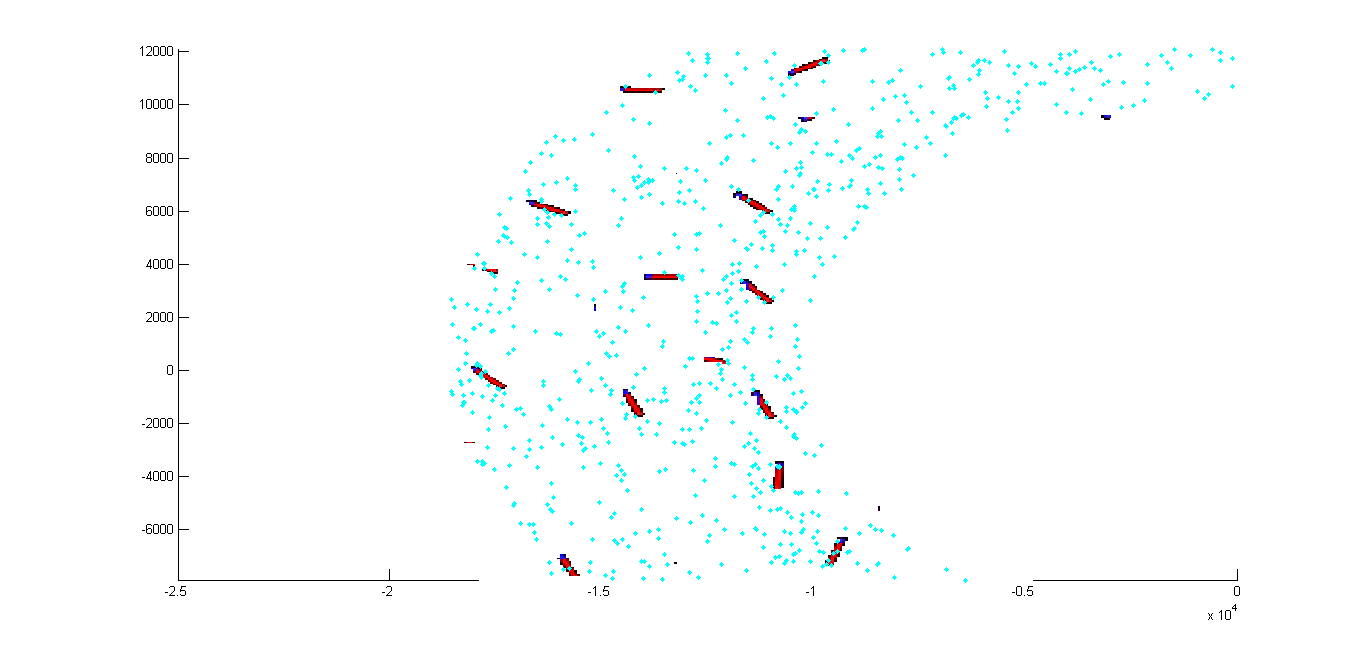
Θ1 varies along a circle around the toroid (in 2d), the values of Θ2 vary along a ring(crossection of the toroid) for a particular Θ1. |
 |
 |
Θ2= 0 for outermost equitorial points, Θ2= +π and -Π for the innermost equatorial points.Θ2 varies along a straight line |
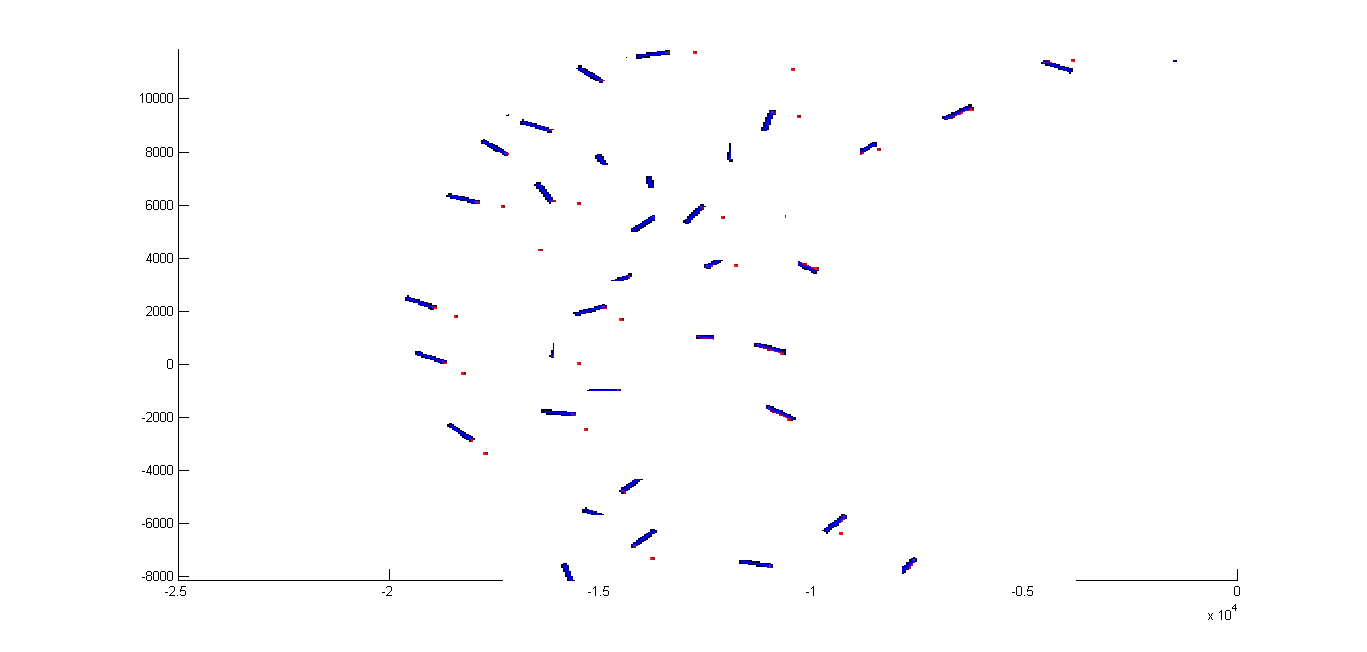
3-D Space for k=5; View-1 |
 |
View-2 for k=5 |
 |


 |
 |
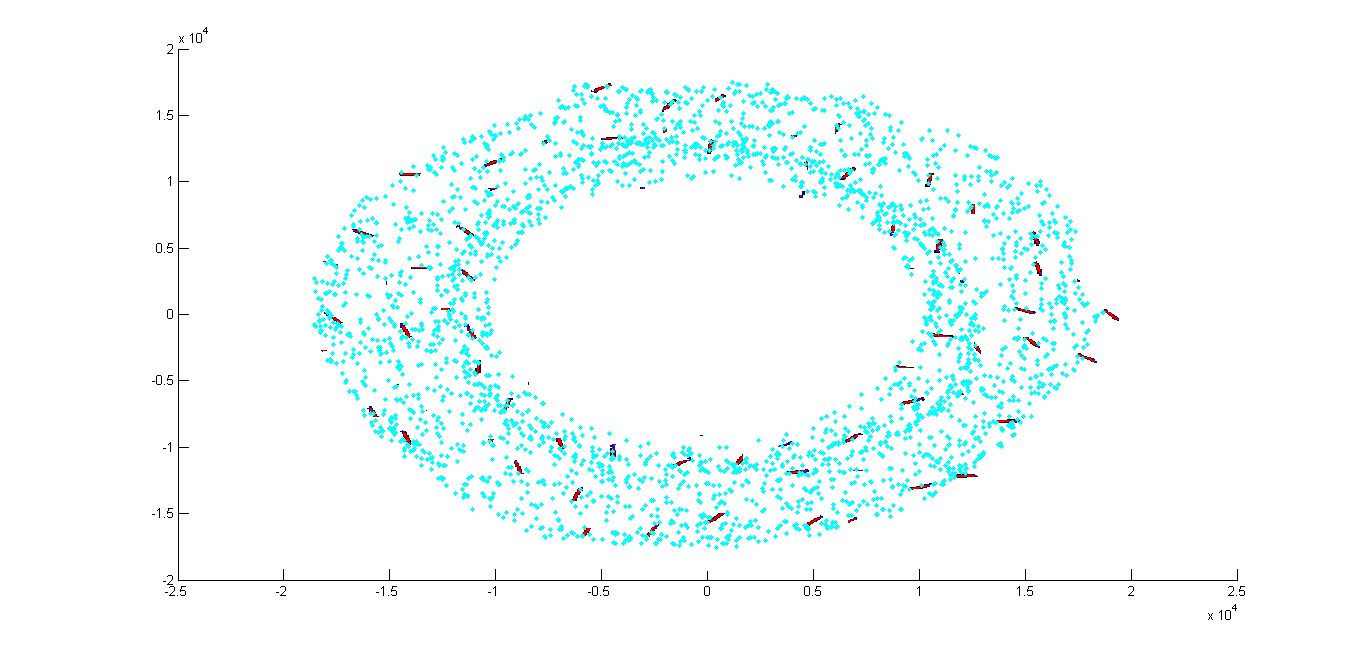
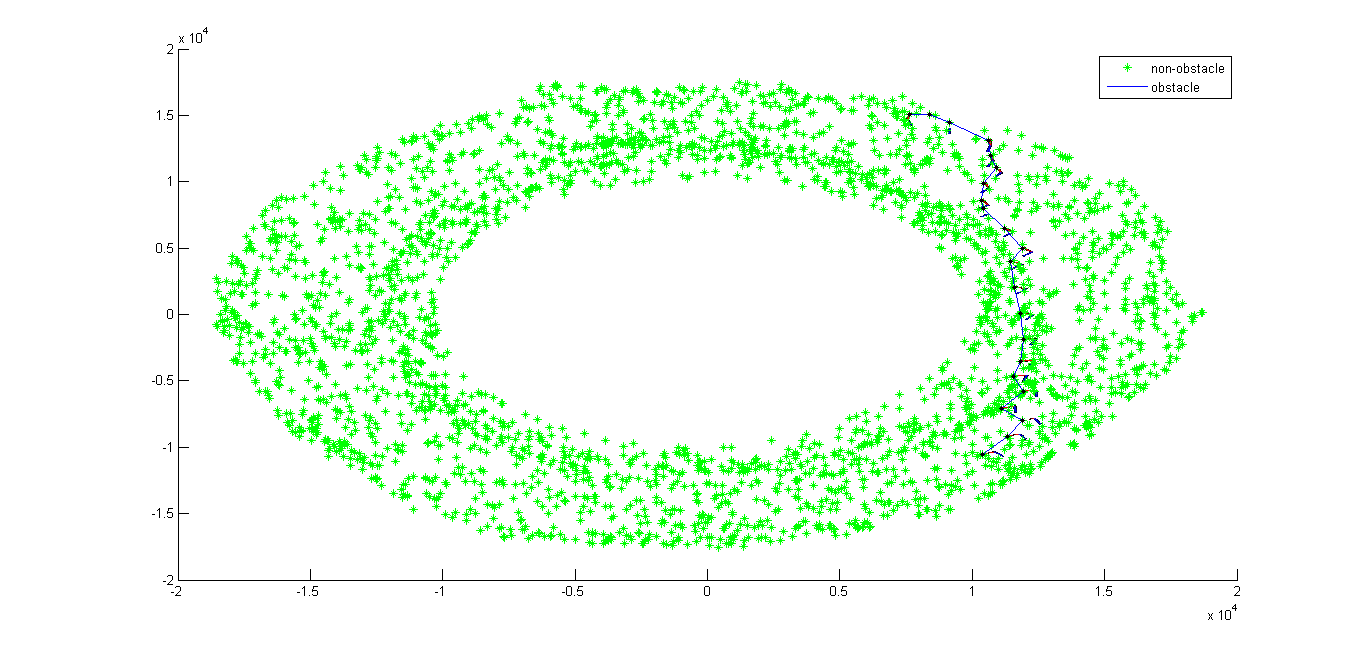
Path from image 0001.png to 0161.png in 2-D isomap embedding when the Obstacle 1 is present |
 |
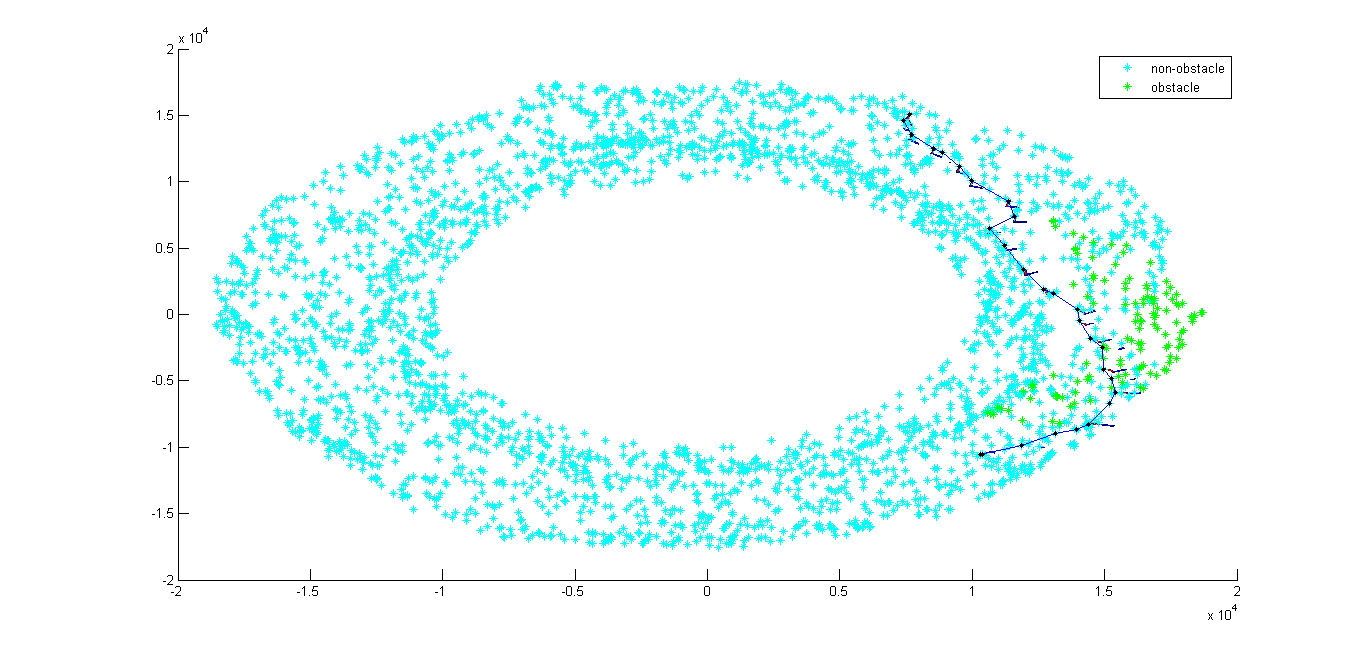 |
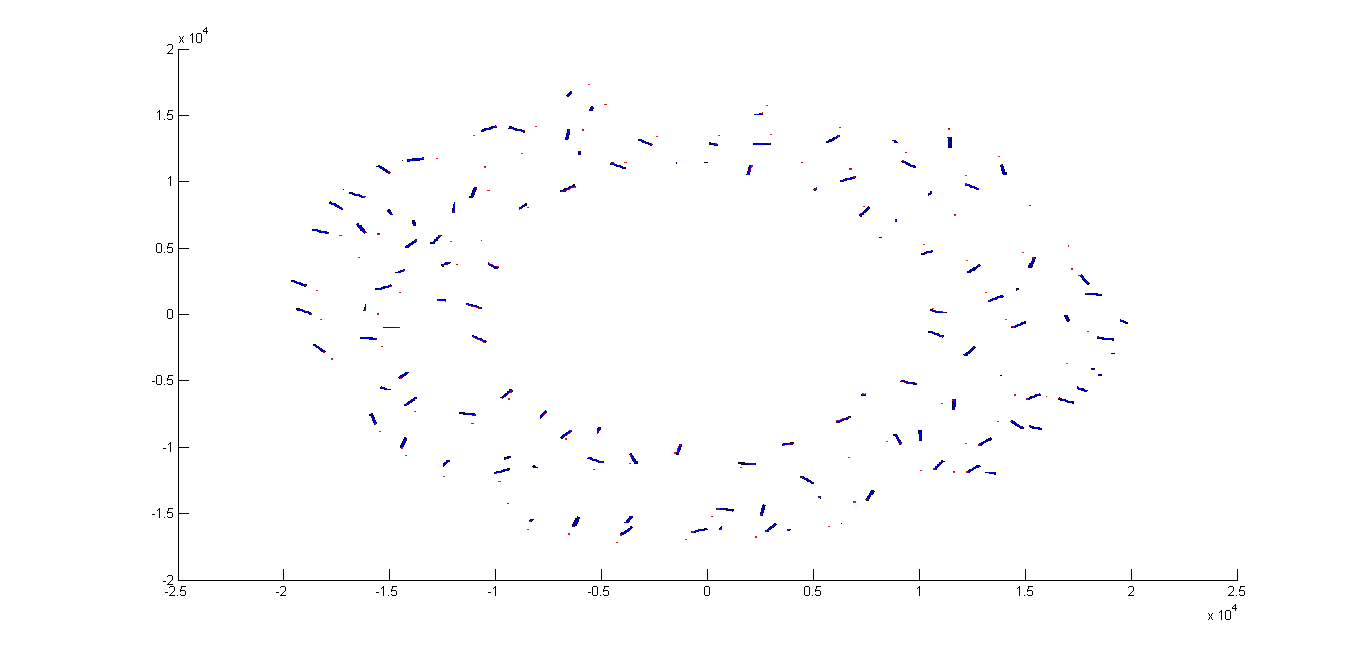
Path from image 0001.png to 0161.png in 2-D Isomap embedding when Obstacle 2 is present superimposed with robot arms along the path. |
The path in above figure appears to be similar to the path without an obstacle, no points in the shortest path |