Matlab Codes(.m files) here
A.) Dimensionality determination:
A steep fall occurs while going from dimensionality 1 to 2, thus Dimensionality of this manifold of images is 2.
B.) 2-Dimensional Embedding:
C.) Zoomed view of an area of this 2-dimensional manifold:
Red rods have almost a similar inclination in a small region
Blue rods have varying inclinations corresponding to similar regions of red
Implies for a given "theta 1" values, "theta 2" shows a complete 360 degrees variation which can be more clearly visible in a 3-d isomap
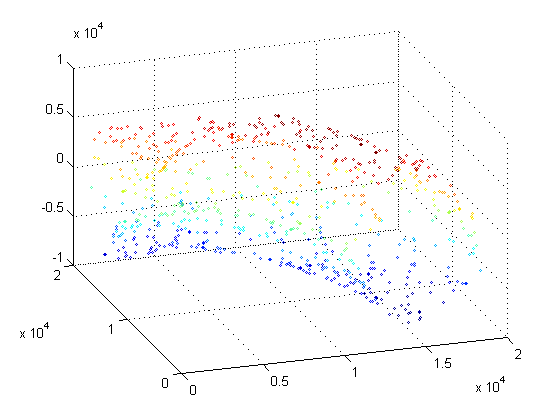
D.) Embedding in 3D space:
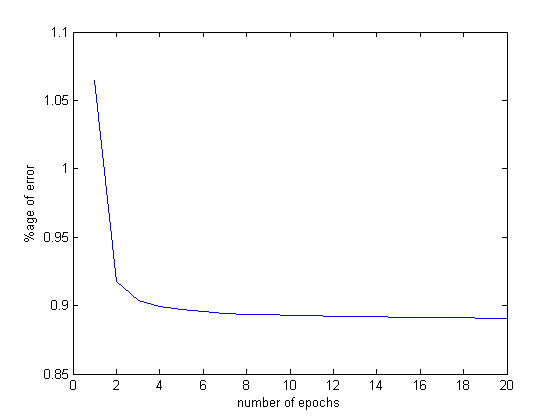
E.) Network training:
a. Training network from 2-d parameters to control parameters
b. Training network directly from images to control parameters
Convergence:
- Approach 1, of first producing the isomap and then mapping the parameters from this 2-dimensional space to control space is faster
Reason:
- Dimensionality reduction eases the training job, as networks are to be trained from 2-d input parameters to 4-d output parameters
as compared to direct mapping, where a network is needed to be trained for input vector of order of "10,000"'s to 4-d output parameters
- Dimensionality reduction is slow but still consumes lesser time and memory as compared to the direct network training approach
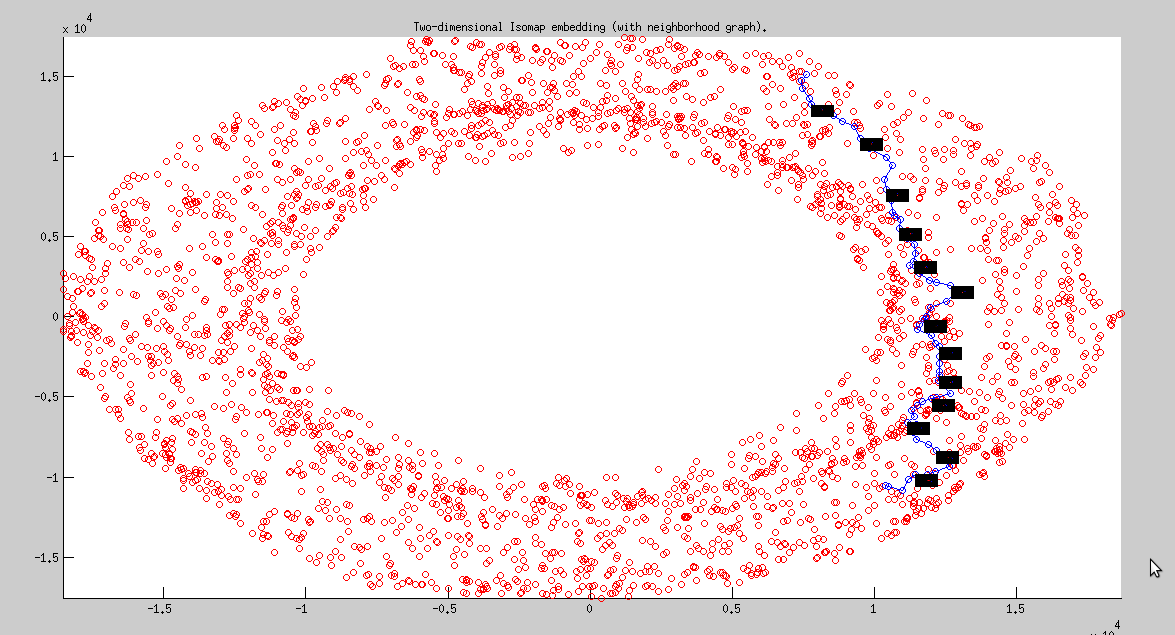
c. Shortest path from node "1" to "161" in this 2-dimensional isomap
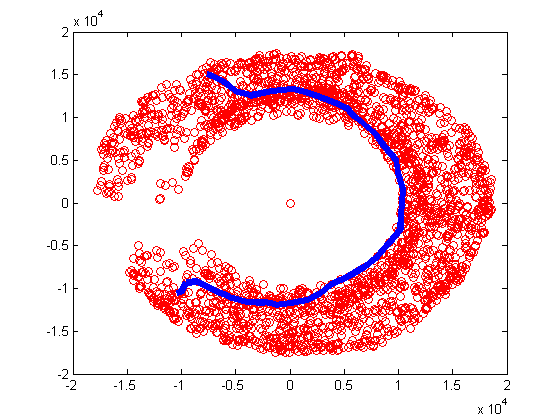
F.) Path plan on the attenuated graph-1
G.) Path plan on the attenuated graph-2
Difference between above two path finding problems:
In part (i) a complete sector of the torroid gets removed from the final embedded space thereby leaving a longer route,
(shifting "theta1" along
anti-clockwise direction), while in part(ii) only a small section gets removed from the torroid,
thus allowing a shortest path along clockwise direction itself.