Homework 3
Question 1
Part a
- The dimentionality of this plot is justified at 2 because the elbow in residual variance vs dimentionality plot appears at 2.
Part b
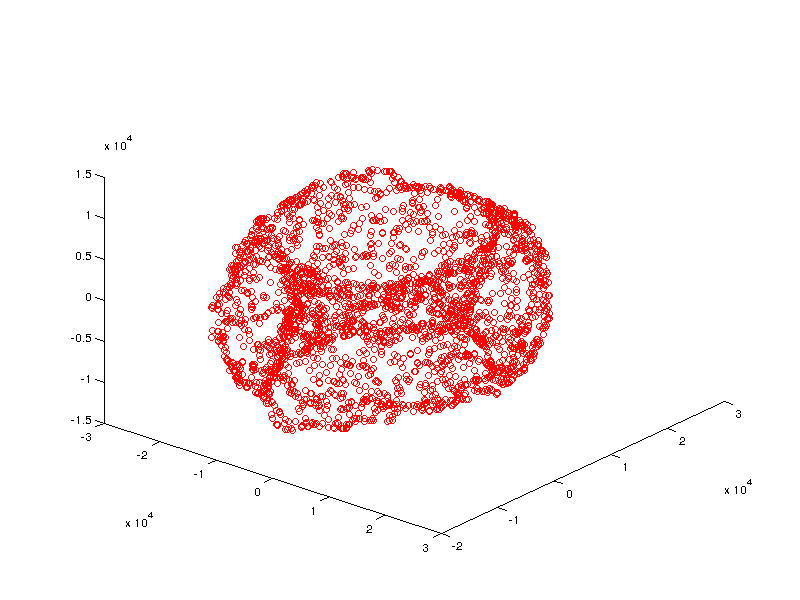
- The 2-dimensional manifold of the given robot system is shown below at left
- Some images are too superimposed in the right plot

Part c
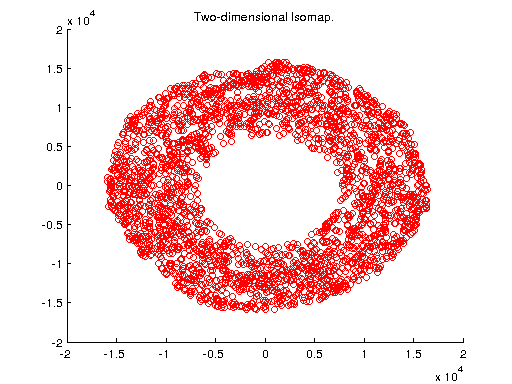
- From the 2-D isomap below, we can clearly see that :-
- images having almost same value of Theta1(red rod is in same orientation) are lying in radially outward direction of torus.
- images having almost same value of Theta2(blue rod is in same orientation) are lying in tangential direction of torus
Part d
- 3-D embedding of points is below
Part e
- Both methods are not giving good results
|
Algorithm
|
epoch
|
Learning Rate
|
Batchsize
|
Error Rate
|
Execution Time
|
Dataset
|
|
Neural Networks
|
200
|
1
|
50
|
48.4%
|
12.44 s
|
v1,v2
|
|
Neural Networks
|
200
|
1
|
50
|
67.3%
|
1703 s
|
Image
|
|
Deep Belief Networks
|
100
|
1
|
100
|
45.5%
|
14.19 s
|
v1,v2
|
|
Deep Belief Networks
|
100
|
1
|
100
|
27%
|
2803 s
|
Image
|
- The path from start ie 1.png to 161.png as embedded on 2-D isomap gives
- green is the starting point (1.png) and blue is goal point (161.png)
Part f
- If we consider obstacle 1, then even red rod would not rotate fully
- the torus should have a cut in itself
- path should not pass through this cut and should come from other way round


Part g
- If we consider obstacle 2, then red rod can rotate fully, but the blue one may collide with obstacle
- the torus should have a slice cut off somewhere
- the path may pass through this narrow gap left after slice


Scripts and Results .