Welcome!


3D Autonomous Navigation using Kinect
Everybody has a robot fantasy! Are you one of the (lazy) guys (like us) who want a personalized robot to move around and do stuff for you? You are in the right place! In this project, we aim for the navigation of the humanoid Aldebaran Nao to a specified goal. You can't quite speak the position yet, but soon enough!
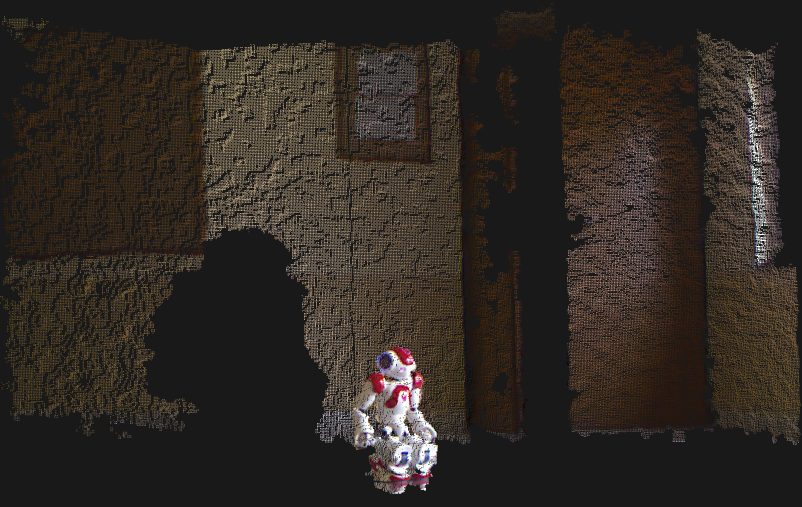
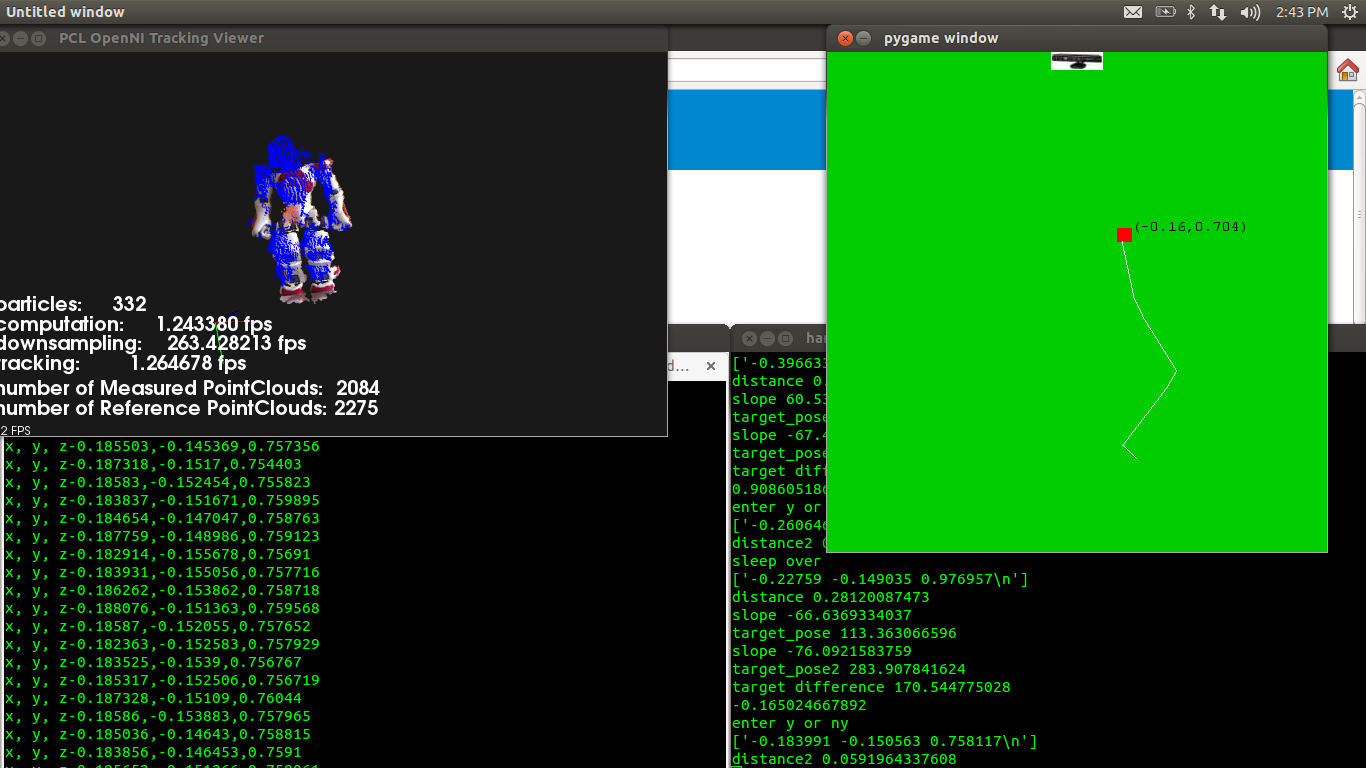
The navigation is achieved through the tracking using Kinect point cloud, and feedback through the position tracking of Nao. You give the goal position on a pygame window and voila! Nao moves.!